
Festo’s latest biomimetic robots are a flying feathered bird and ball-bottomed helper arm
You could be excused for thinking that German robotics company Festo does nothing but put together fabulous prototype robots built to resemble kangaroos, jellyfish, and other living things. They do in fact actually make real industrial robots, but it’s hard not to marvel at their biomimetic experiments; Case in point, the feathered BionicSwift and absurd BionicMobileAssistant motile arm.
Festo already has a flying bird robot — I wrote about it almost 10 years ago. They even made a flying bat as a follow-up. But the BionicSwift is more impressive than both because, in an effort to more closely resemble its avian inspiration, it flies using artificial feathers.
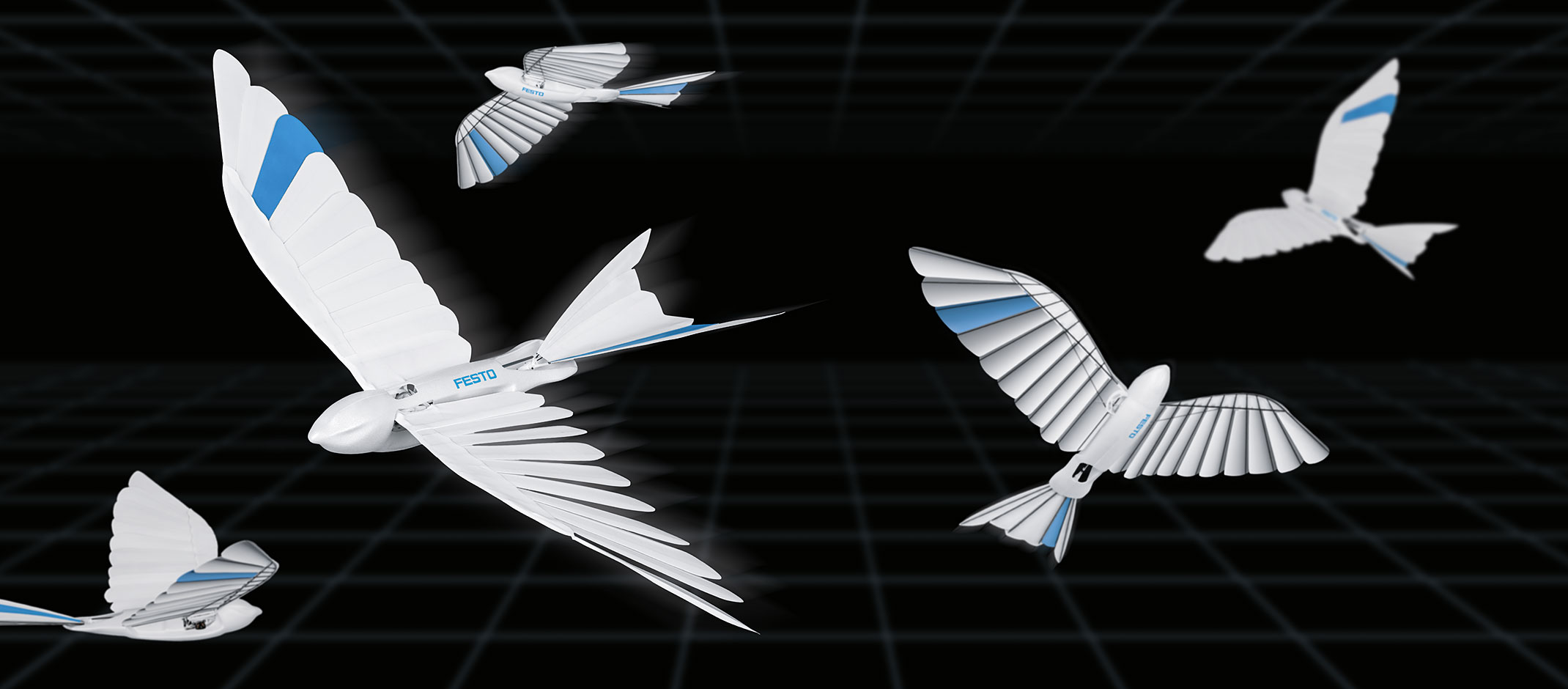
Image Credits: Festo
“The individual lamellae [i.e. feathers] are made of an ultralight, flexible but very robust foam and lie on top of each other like shingles. Connected to a carbon quill, they are attached to the actual hand and arm wings as in the natural model,” Festo writes in its description of the robot.
The articulating lamellae allow the wing to work like a bird’s, forming a powerful scoop on the downstroke to push against the air, but separating on the upstroke to produce less resistance. Everything is controlled on-board, including the indoor positioning system that the bird was ostensibly built to demonstrate. Flocks of BionicSwifts can fly in close quarters and avoid each other using an ultra wideband setup.
Festo’s BionicMobileAssistant seems like it would be more practical, and in a way it is, but not by much. The robot is basically an arm emerging from a wheeled base — or rather a balled one. The spherical bottom is driven by three “omniwheels,” letting it move easily in any direction while minimizing its footprint.

The hand is a showcase of modern robotic gripper design, with all kinds of state of the art tech packed in there — but the result is less than the sum of its parts. What makes a robotic hand good these days is less that it has a hundred sensors in the palm and fingers and huge motility for its thumb, but rather intelligence about what it is gripping. An unadorned pincer may be a better “hand” than one that looks like the real thing because of the software that backs it up.
Not to mention the spherical movement strategy makes for something of an unstable base. It’s telling that the robot is transporting scarves and not plates of food or parts.
Of course, it’s silly to criticize such a machine, which is aspirational rather than practical. But it’s important to understand that these fascinating creations from Festo are hints at a possible future more than anything.






from TechCrunch https://ift.tt/3ilF5Fb

No comments
Post a Comment